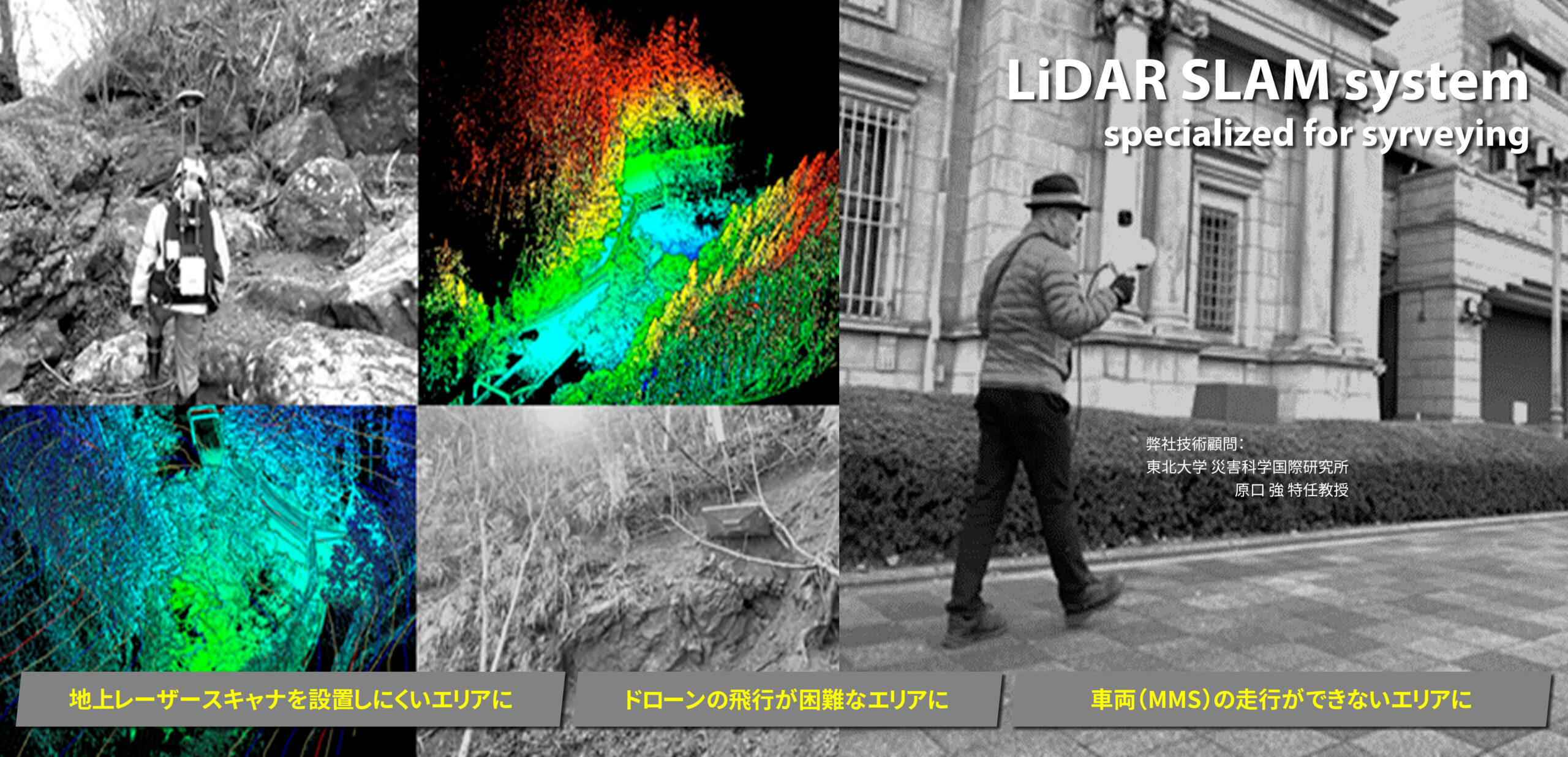




キーワードは “ 歩行空間のデジタル化 ”シンプルな装備で歩きながら効率的に空間情報を取得
日本全国の都市デジタルツイン実現に向けて、国土交通省を中心にさまざまな取り組み展開されており、この現実世界をデジタル化するための計測技術も多岐にわっています。道路・橋梁・トンネル・河川・港湾・ダムといった重要インフラの情報整備や市街地の現況データ、急傾斜地や山間部の地形データなど、従来の手法ではカバーできないエリアをいかに計測するか。その機動力を活かした新たな計測技術が、LiDAR SLAM です。





軽量コンパクト・機動力重視のハンディモデルLiGrip O1Lite (オーワンライト)
ローコスト&ハイパフォーマンス!
LiGrip O1Lite の特長は、なんといってもその機動力にあります。LiDARセンサー、制御ユニット、カメラ、バッテリのすべてをコンパクトにインテグレートし、システム全体の重量はわずか1kgという超軽量設計。シンプルな装備で、抜群のパフォーマンスを発揮します。
これまで現況観測は、TSや電子平板を使って現場を “1点1点押さえてくる ” いわば【現場実体トレース方式】 でした。 LiGrip O1Lite を使えば、現場の情報を “点群とカラー動画” でスピ-ディにまるごと取得。現場での観測作業を大幅に省力化することで、 オフィスでの 【点群トレース】 作業に集中できます。
- ショートレンジ:40m測距
- スキャンレート:20万点/秒
- 測距精度:±2cm
- 移動速度:MAX 7km/h
- 相対精度:3cm / 絶対精度:5㎝
- 前方カメラ標準搭載
- データ解析ソフトウェア付属
| LiGrip O1 Light | |
|---|---|
| 【S】 | 【SG】GNSS搭載モデル |
|
 |



ロータリーLiDARセンサーを搭載LiGrip H120(A10)
ちょうどいい スタンダード LiDAR SLAM
LiGrip H120は、ロータリーLiDARセンサーを搭載した スキャンレート32万点/秒のミドルレンジの測距が可能なスタンダードモデルです。その機動性を活かして狭小部の計測など、小回りの利いた運用が可能です。高性能LiDARセンサーと高解像度パノラマカメラを統合することで、高精度の点群情報と点群にカラーレンダリングするための画像情報を迅速に収集でき、現場のさまざまなシーンを復元できます。LiDARセンサーユニットは、専用のバックパックにワンタッチで着脱可能。両⼿が使えるので、山間部や斜面などの現場でも効率よく安全に計測作業がおこなえます。
- ミドルレンジ:MAX 120m測距
- スキャンレート:32万点/秒
- 測距精度:±2cm
- 移動速度:MAX 7km/h
- 相対精度:3cm / 絶対精度:5㎝
- タイムラプスモードで撮影データの解析作業を大幅に効率アップ
| LiGrip H120 (A-10) | |
|---|---|
| 【S】 | 【SG】GNSS搭載モデル |
|
ハンディタイプ
|
バックパックタイプ 
|



ハイパフォーマンスモデルLiGrip H300
LiDAR SLAM 極める!
LiGrip H300は、ロータリーLiDARセンサーを搭載した スキャンレート64万点/秒、最大300mのロングレンジ測距が可能な LiGripシリーズの最上位モデルです。バイクでの走行が可能な場所であれば、最⼤40km/h の移動スピードで広範なエリアを効率的に計測することができます。オプションで車載キットやドローン搭載キットもご用意しました。
- ロングレンジ:MAX 300m測距
- スキャンレート:64万点/秒
- 測距精度:±1cm
- 移動速度:MAX 40km/h
- 相対精度:1cm / 絶対精度:5㎝
- タイムラプスモードで撮影データの解析作業を大幅に効率アップ
| LiGrip H300 | |
|---|---|
| 【S】 | 【SG】GNSS搭載モデル |
|
ハンディタイプ 
|
バックパックタイプ
|





2基のLiDARセンサーで、より密度の高い
点群を取得可能なバックパックタイプLiBackpack DGC50H
水平方向・垂直方向にLiDARセンサーを搭載したハイエンドモデル
バックパックタイプ DGC50H の スキャンレートは、640,000点/秒、背負って歩きながら高密度の3D点群を取得できます。この性能を活かしてバイク走行での運用が可能。最大20km/hで走りながら、道路周辺の地物や市街地の計測がおこなえるのもこのモデルの魅力です。
- 内蔵されたIMUにより、自己位置を推定してリアルタイムに点群を可視化
- 360°パノラマカメラにより、点群にリアルな色彩を表現
- 最大測距距離は120m、相対精度3cm/絶対精度5㎝で高精度な3Dマッピングを実現
- GNSSを標準で搭載し、PPK後処理キネマティックにより位置決め精度1cm+1pmを確保
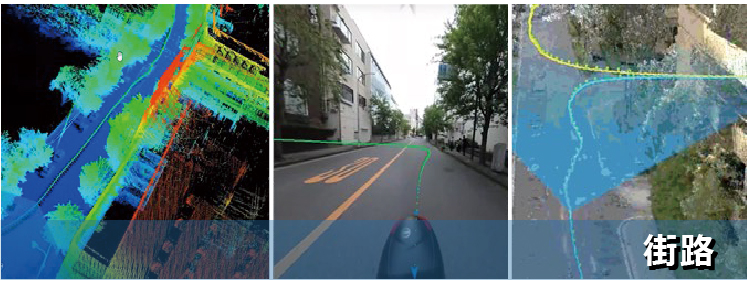
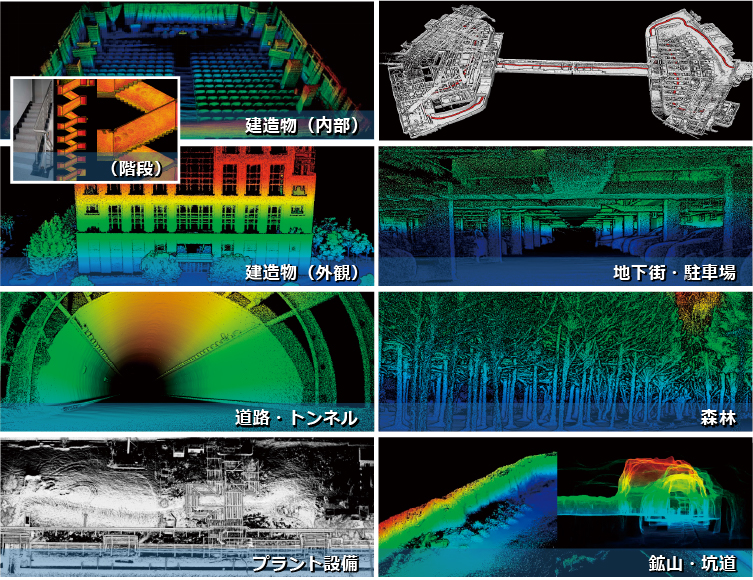
LiDAR SLAM system活用例
| LiDAR SLAM system |
LiGrip O1 Light |
LiGrip H120(A-10) |
LiGrip H300 |
LiBackpack DGC50H |
|---|---|---|---|---|
| 【S】 | 【S】 | 【S】 | ||
| ハンディモデル | ハンディモデル | ハンディモデル | バックパックモデル | |
|
|
|
|

|

|
| システム製造元 | 米国 GreenValley International 社 | |||
| ■ システム仕様 | ||||
| 最大測距距離 | 40 m | 120 m | 300 m | 120 m |
| 相対精度 ※1 | ≦ 2 cm | ≦ 3 cm | ≦ 1 cm | ≦ 3 cm |
| 絶対精度 ※1 | ≦ 5 cm | ≦ 5 cm | ≦ 5 cm | ≦ 5 cm |
| 視野角(FOV) | 水平 360° / 垂直 -7°~52° | 水平 280° / 垂直 360° | 水平 280° / 垂直 360° | 水平 360° / 垂直 ±90° |
| 最大移動速度 | 約 7 km/h | 約 7 km/h | 約 40 km/h | 約 20 km/h |
| 内部ストレージ(TFカード) | 256 GB | 256 GB | 512 GB | 512 GB |
| 通信ポート | USB / TF Card | USB / Ethernet | USB / Ethernet | HDMI / USB / Ethernet |
| バッテリー容量 | 3350 mAh | 5870 mAh | 5870 mAh | 5875 mAh |
| 稼働時間 | 約 3 時間 | 約 4 時間 | 約 3 時間 | 約 2 時間 |
| サイズ | L184 × W115 × H304 mm | L204 × W130 × H385 mm | L195 × W125 × H350 mm | L1135 × W318 × H315 mm |
| 重量 | 1.0kg ※2 | 1.74kg ※3 | 1.67kg ※3 | 8.6kg |
| ■ LiDAR センサー仕様 | ||||
| LiDAR センサー搭載台数 | 1 台 | 1 台 | 1 台 | 2 台 |
| スキャンレート | 200,000 点/s | 320,000 点/s | 640,000 点/s | 640,000 点/s |
| LiDAR レンジング精度 | ±2 cm | ±3 cm | ±1 cm | ±1 cm |
| レーザークラス | アイセーフティ Class 1 | アイセーフティ Class 1 | アイセーフティ Class 1 | アイセーフティ Class 1 |
| ■ Camera イメージセンサー仕様 | ||||
| 画像タイプ / 解像度 | 前方カメラ FOV 240°~143° 3840 × 2160 (0~5fps) |
360° パノラマ画像 6080 × 3040 |
360° パノラマ画像 6528 × 3264 |
360° パノラマ画像 3840 × 1920 |
| ビデオ解像度 | – | 5760 × 2880 Time-lapse |
6144 × 3072 Time-lapse |
5760 × 2880 Time-lapse |
| GNSS対応 モデル |
【SG】 | 【SG】 | 【SG】 | バックパックモデル |
| ハンディモデル | ハンディ&バックパック | ハンディ&バックパック | ||
|
|
|

|
|
| ■ GNSS | ||||
| GNSS取得衛星 | GPS / GLONASS / GALILEO / QZSS / GBeiDou | |||
| GNSSポジショニング精度 | 1cm + 1ppm PPK(後処理キネマティック) | |||
| GNSS解析ソフトウェア | LiBackpack-LiNav | |||
| 地上GNSS基地局 | GNSS Base Station 【別売】 | |||
| ■ データ解析・点群処理ソフトウェア | ||||
| 軌跡解析ソフトウェア | LiFuser-BP 【標準】 | |||
| 3D点群編集処理ソフトウェア | LiDAR360 【別売】 | |||
※1 環境および移動ルートの影響を受けます ※2 バッテリ重量を含む ※3 ハンドヘルド部の重量